
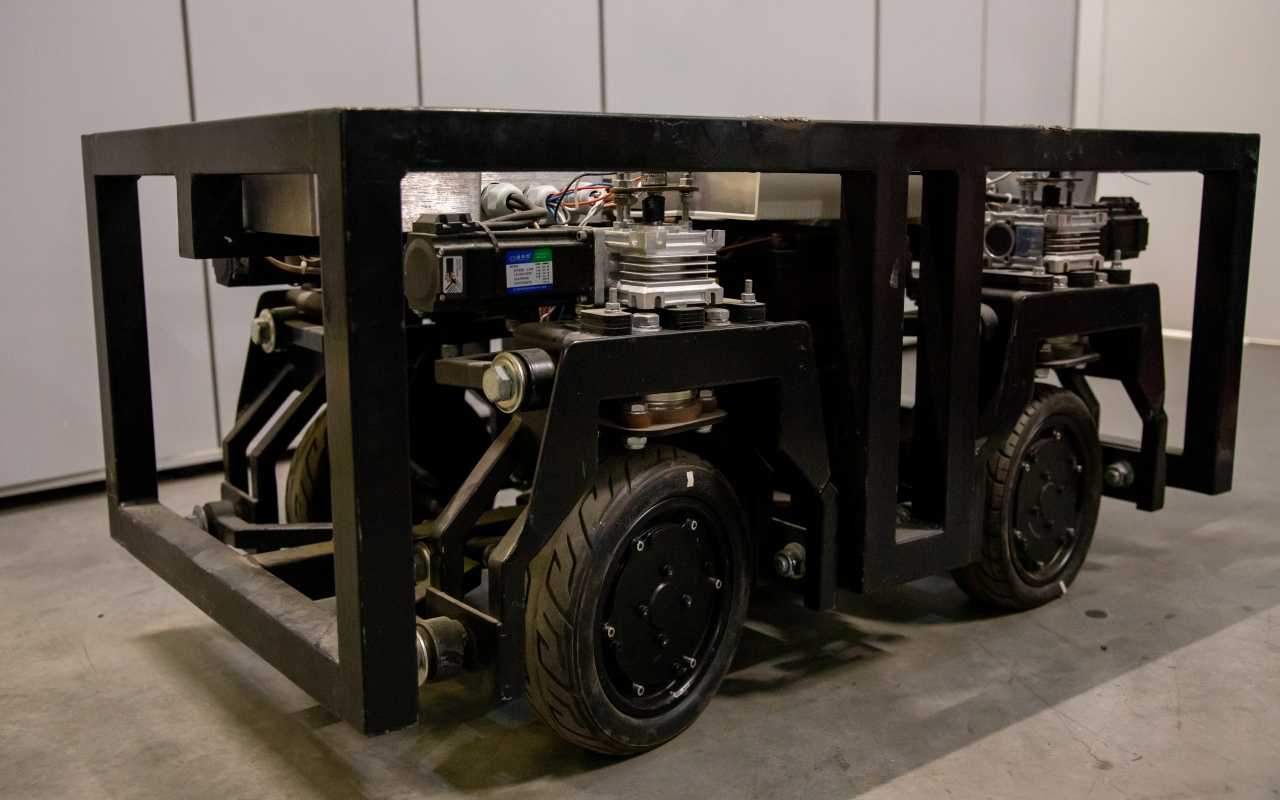
Благодаря модульной конструкции платформа может быть укомплектована аппаратурой для выполнения различных задач. Колесный робот способен перевозить грузы до 150 кг.
13.09.2023
Сегодня робототехника является одним из передовых исследовательских направлений, которые открывают большие возможности для повышения автоматизации и производительности труда в самых разных отраслях экономики России – от промышленности и сельского хозяйства до освоения космоса и логистики. Одной из таких сфер является промышленность: автономные роботы имеют большой потенциал для повышения точности и скорости при транспортировке тяжелых грузов в по территории предприятий.
Однако для внедрения «умных» платформ в промышленности требуется разработка электропривода, удобных и понятных интерфейсов управления, а также создания точных систем позиционирования, которые обеспечат безопасность и правильность функционирования робота.
«Мы разработали автоматизированную четырехколесную платформу, которая может самостоятельно перевозить грузы весом до 150 кг, обеспечивая тем самым эффективную логистику на территории предприятий. Благодаря модульной конструкции, а также тому, что платформа обладает высокоманевренной кинематической схемой 4WD4WS, она способна передвигаться в узких пространствах, разворачиваться на месте, менять направление движения без разворота, а также ездить боком, и все это с точностью до двух сантиметров. Мы на базе ЛЭТИ также разработали рулевое мотор -колесо, инвертор и программное обеспечение».
Разработанное в ЛЭТИ программное обеспечение позволяет пользователю построить маршрут транспортировки грузов (между двумя или несколькими точками). После запуска робот будет курсировать по заданной траектории самостоятельно.
Для обеспечения навигации и безопасности платформа может быть оснащена радаром, лидаром и другими источниками, позволяющими отслеживать ее положение и препятствия на пути. Максимальная скорость колесного робота – 12 км/ч, чего более чем достаточно для выполнения задач на промышленных объектах.
На данный момент аналоги, распространённые на рынке, приводятся в движение одним или двумя моторами. Разработка ЛЭТИ отличается от существующих роботов более высокой надежностью и КПД. Разработчики исключили механические передачи и поставили электропривод на каждое колесо. Такое решение позволило упростить элементы подвески и поворотные узлы. В случае отказа одного или нескольких электроприводов система управления позволяет продолжить движение по заданному маршруту, используя исправные приводы.
«На сегодняшний день наши технические и программные решения используются на предприятиях индустриальных партнеров ЛЭТИ».
Разработки в сфере создания автоматизированных платформ с электродвижением для нужд отечественной промышленности проводятся в СПбГЭТУ «ЛЭТИ» в рамках программы развития университета «Приоритет 2030».